|
<< Click to Display Table of Contents >> Hardware in The Loop Tests |
  
|
| Show/Hide Hidden Text |
|
<< Click to Display Table of Contents >> Hardware in The Loop Tests |
|
| Show/Hide Hidden Text |
Demo files:
hil0_host_demo.mdl
hil1_host_demo.mdl
hil1_target_demo.mdl
hil2_host_demo.mdl
hil2_target_demo.mdl
hil3_host_demo.mdl
hil3_target_demo.mdl
For Waijung, Hardware in the Loop (HIL) Test refers to all simulation scenarios where some kind of hardware is included in simulation loops. The followings show example usages of HIL Test with Waijung. In each simulation scenarios, notice the use of Enable initial value (Closed loop HIL test) feature. When Enable initial value (Closed loop HIL test) is checked, the host Simulnk model automatically transmits initial values to the target as soon as the simulation start, prior to entering simulation loop. This ensures correct data exchange between target and host. This setting is required for Test Case 1 HIL test type only. Users must always manually reset the target hardware to have proper initial values before restarting each HIL Test run. |
For correct real-time performance use the following setting for various HIL Tests.
|
||||||||||||||||||||||||||||||||||
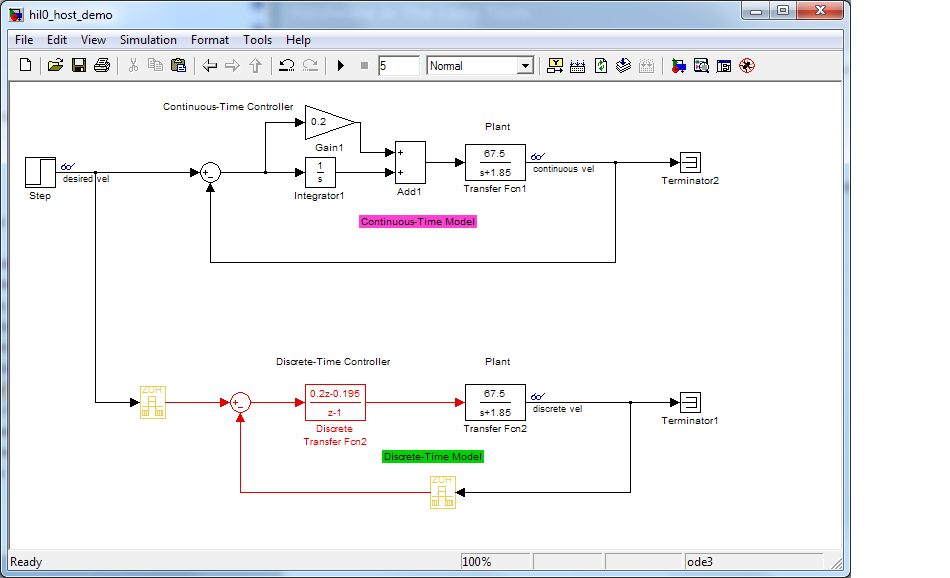
The test case is a simple closed loop controller as shown below. The test compares outputs between continuous-time and discrete-time model running under pure simulation testing.
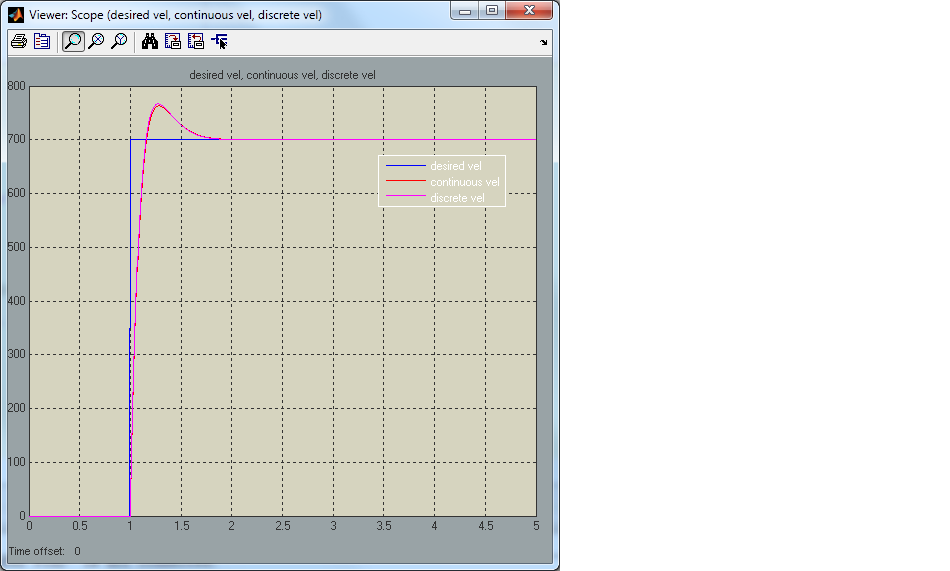
The following picture shows simulation results.
|
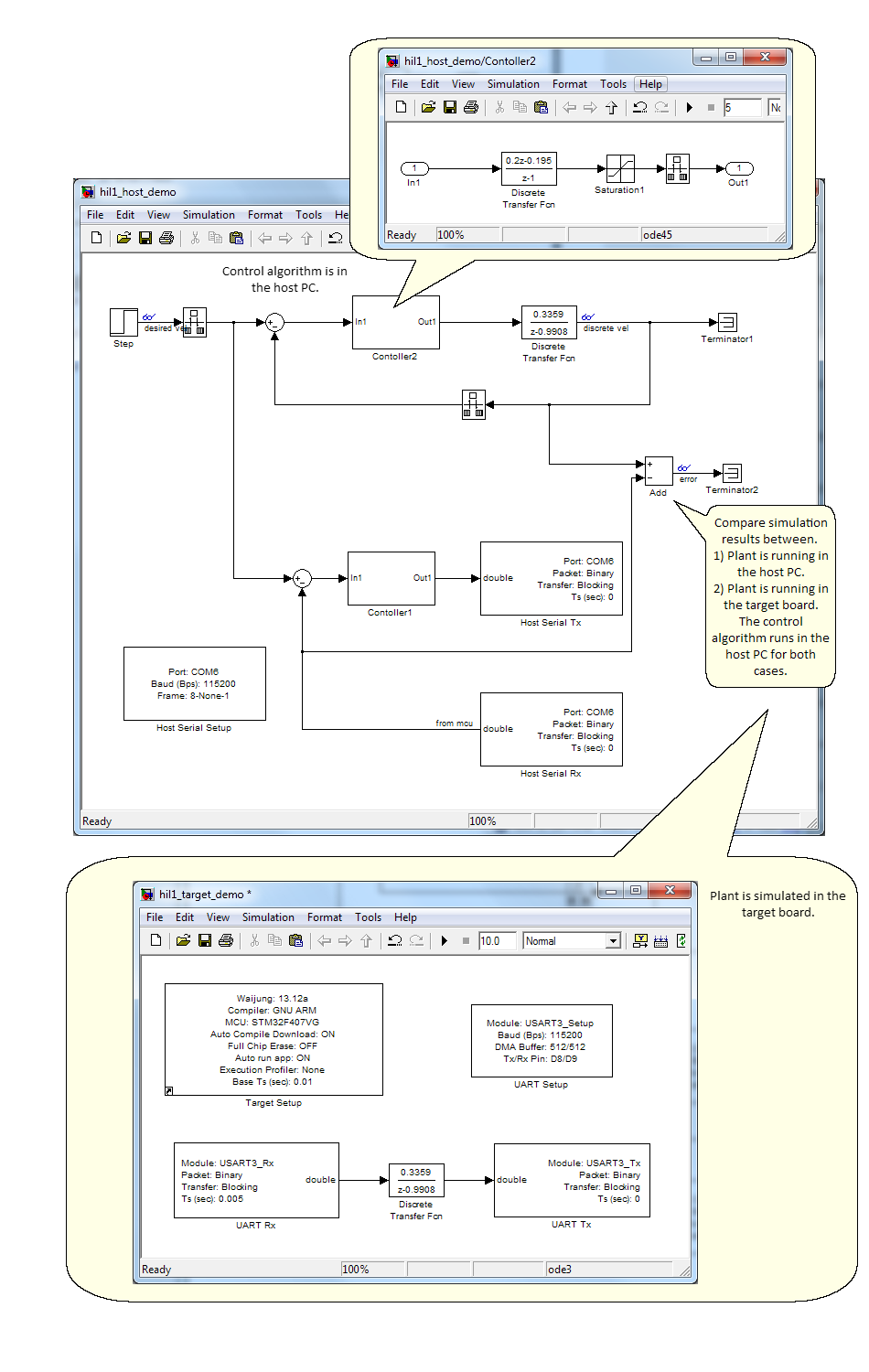
This HIL test compares simulation results between. 1) Plant is running in the host PC. 2) Plant is running in the target board. The control algorithm runs in the host PC for both cases.
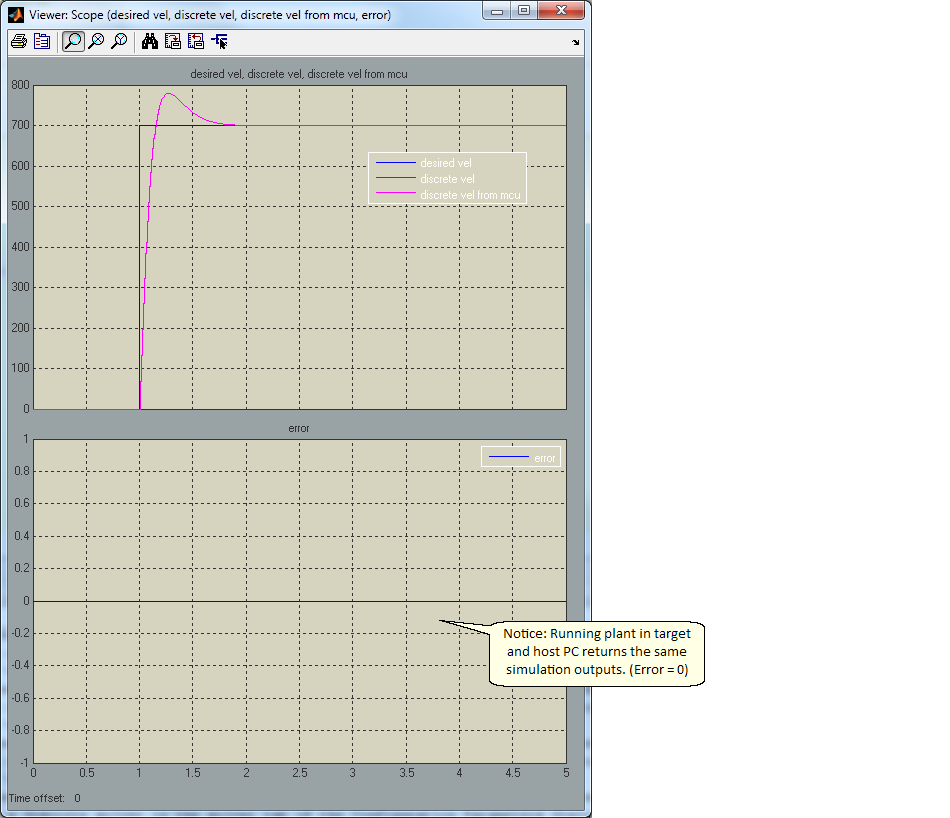
The following show the simulation results.
|
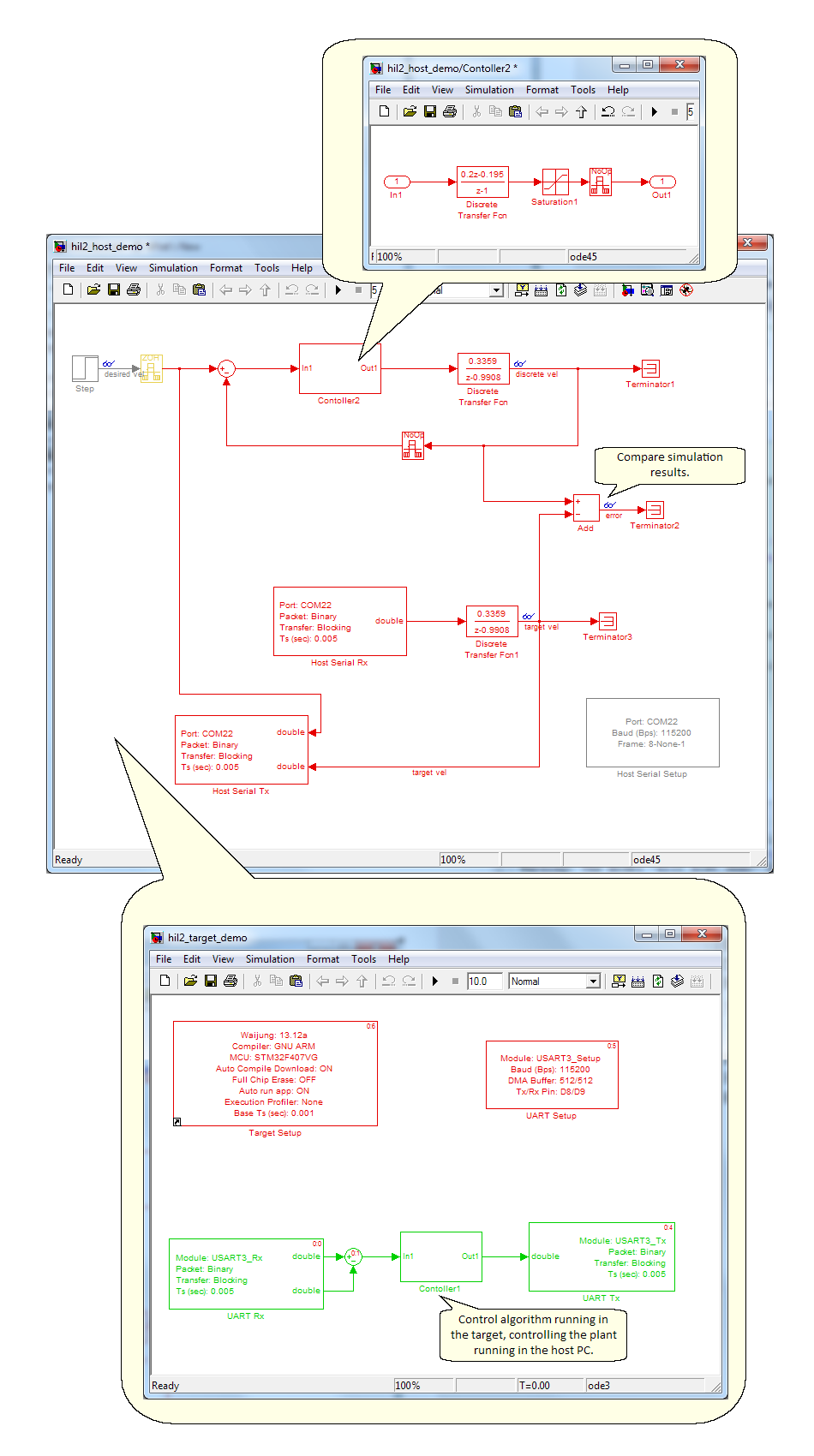
This HIL test compares simulation results between. 1) Controller is running in the host PC. 2) Controller is running in the target board. The plant model runs in the host PC for both cases.
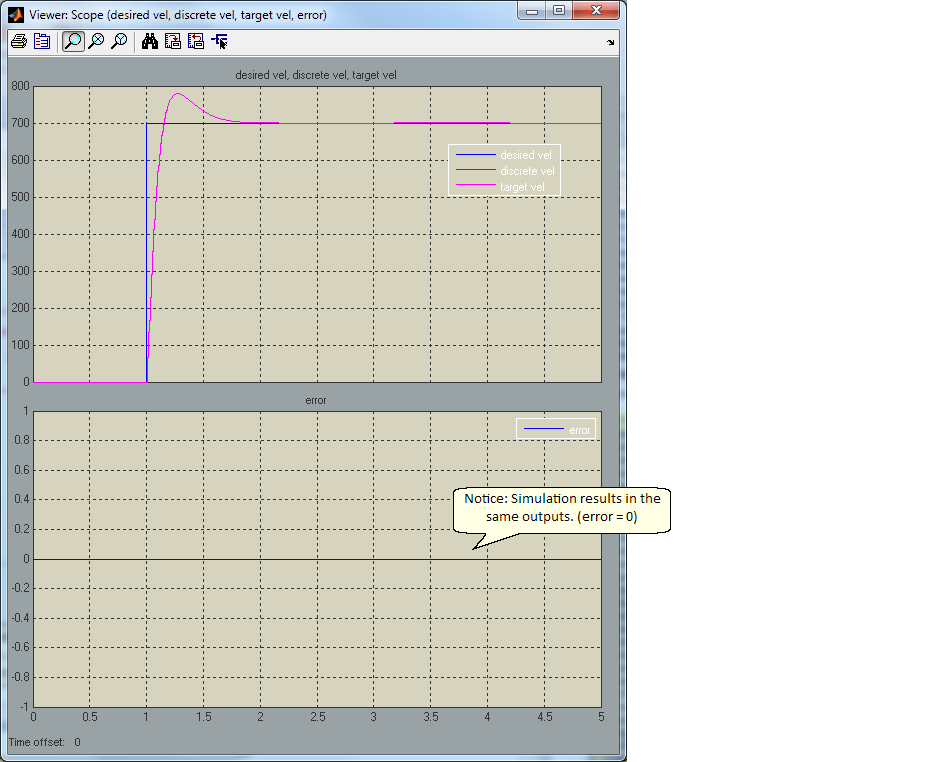
The following show the simulation results.
|
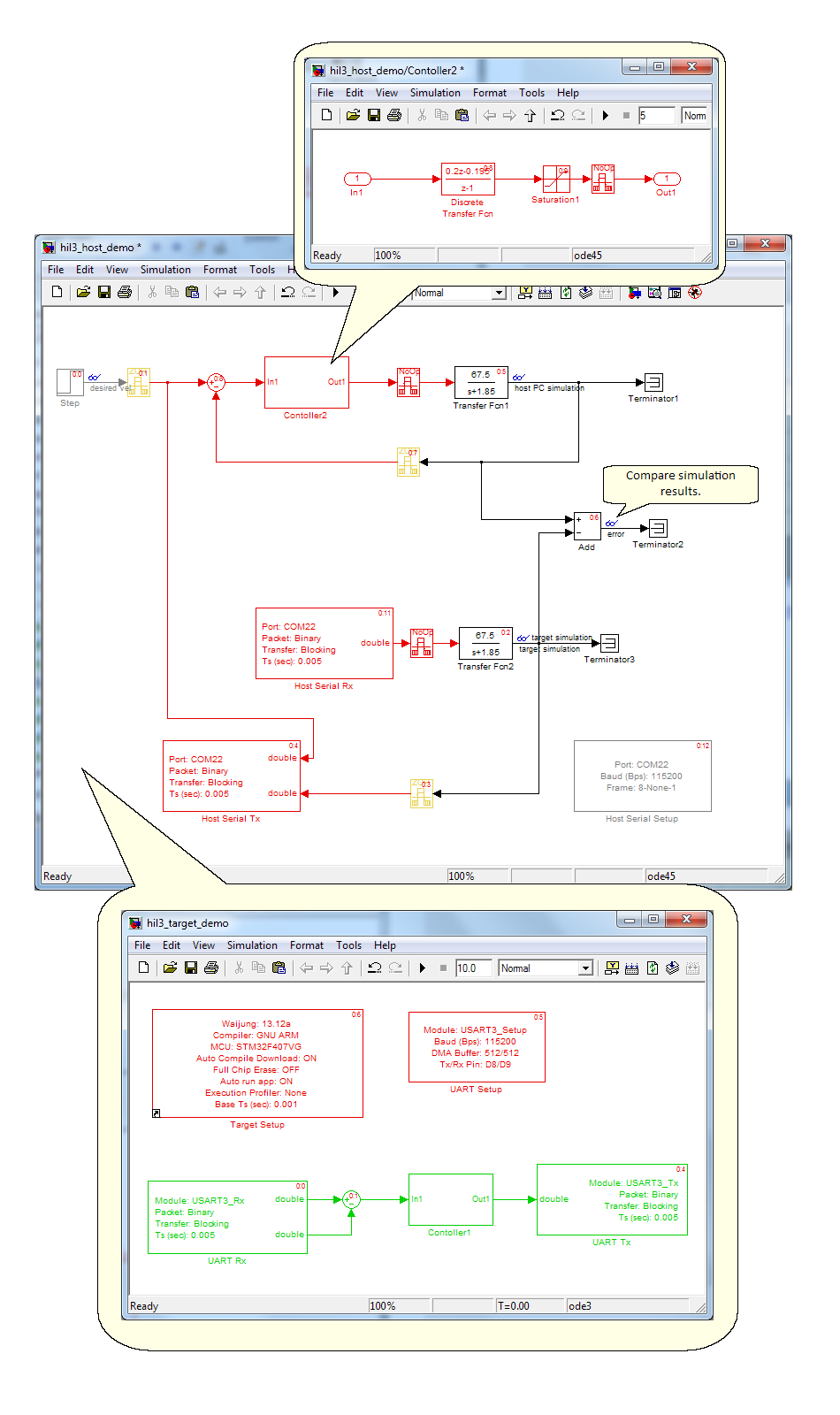
This HIL test compares simulation results between. 1) Discrete-time controller is running in the host PC. 2) Discrete-time controller is running in the target board. The continuous-time plant model runs in the host PC for both cases.
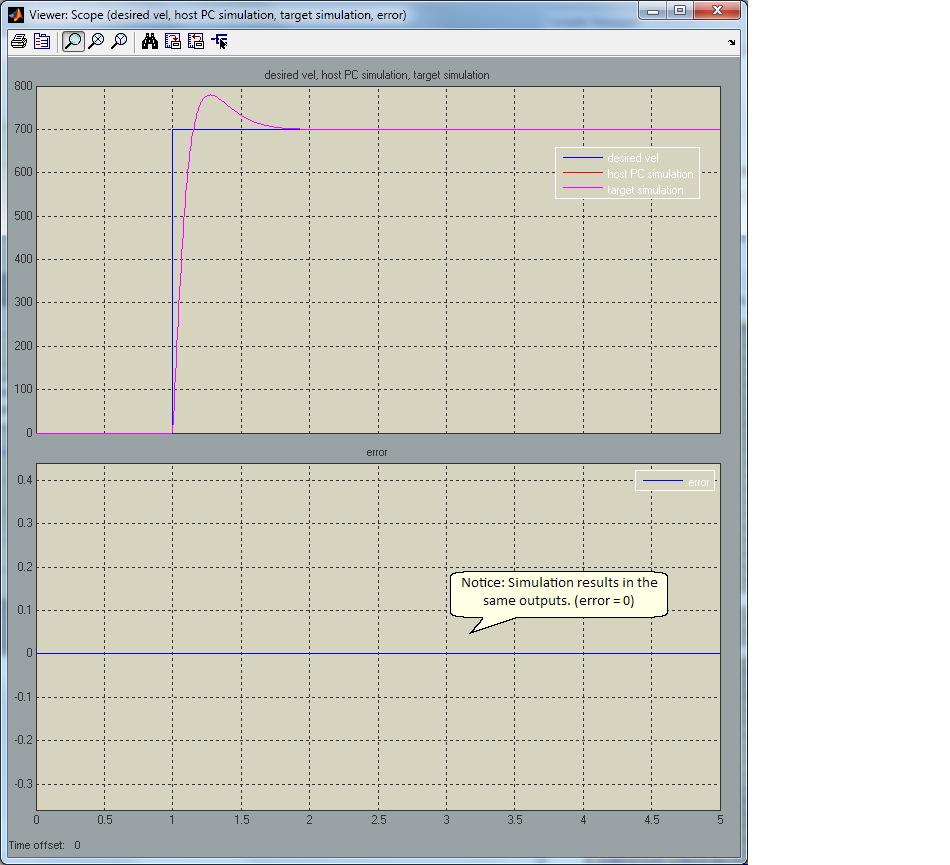
The following show the simulation results.
|